Projects Overview
Over the course of my career, I have successfully led and managed a diverse portfolio of projects, guiding them through the entire lifecycle from conceptualization to deployment. My role has been both strategic and hands-on, encompassing technical execution, administrative oversight, and leadership of interdisciplinary teams. Since 2012, I have had the privilege of collaborating with experts across academia, industry, and funding bodies. To date, I have directed over 40 robotics and AI projects across sectors such as digitalization, manufacturing, healthcare, agriculture, mobility, and automation, overseeing €60 million in third-party funding. In these projects, I was able to employ my multidisciplinary expertise in robotics, computer science, mechanical engineering, and process automation, and integrate electromechanical design, embedded programming, and software development. Implementing machine learning tools, analyzing complex data, and optimizing/automating processes across various platforms were natural parts of these projects.
Here, I present a selection of exemplary projects spanning various application domains.
AI Factory – Intelligent Manufacturing
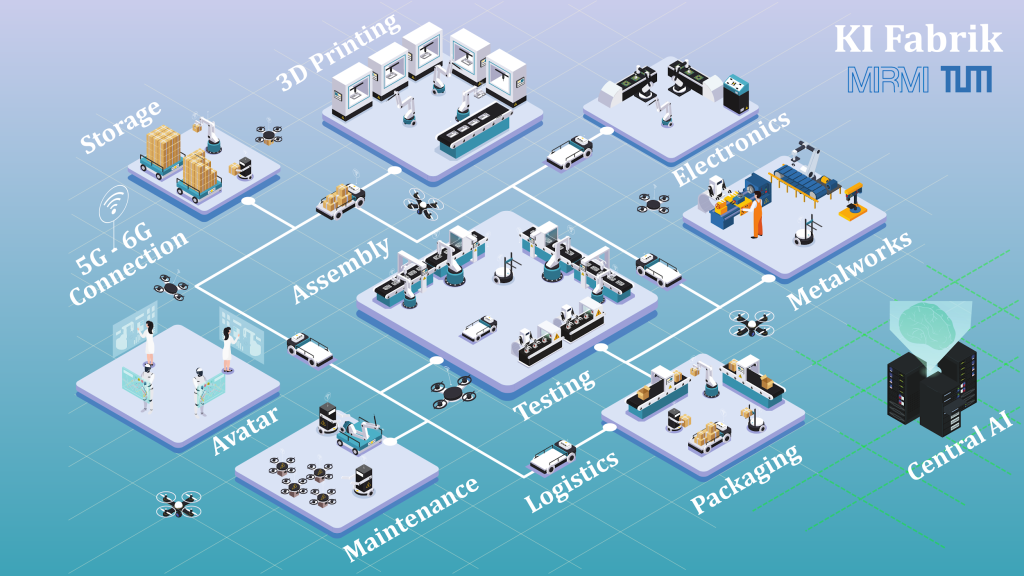
KI.FABRIK BAYERN stands for the ‘Artificial Intelligence Factory in Bavaria.’ This initiative aims to establish a fully flexible and interconnected facility dedicated to the local, resilient, and cost-effective production of cutting-edge IT and mechatronic high-tech components in Bavaria. Traditionally, robots in production processes are isolated behind safety barriers, but KI.FABRIK BAYERN seeks to revolutionize this by facilitating direct physical interaction between AI-driven systems and the factory environment. It also aims to create an intuitive, transparent interface between humans and machines through wearable technology, with human safety remaining a top priority in the development of this future-focused factory.
The initial phase of the project which started in 2020 was sponsored by the Bavarian Ministry of Economic Affairs, Regional Development and Energy (StMWI) and Bavarian State Ministry of Science and the Arts (StMWK).
As the Chief of Science of MIRMI/TUM, I acted as the project manager of the KI.FABRIK Infrastructure (€10 million budget) between 2021-2022. KI.FABRIK relied on this modular, partially autonomous infrastructure that we installed at a 1000 m2 space under the Deutsches Museum in Munich. The modularity of the KI.FABRIK Infrastructure project was driven by research objectives and industrial applications provided to us by our industrial partners BMW, Linde, Reactive Robotics, and Wittenstein. The infrastructure consisted of task-specific work cells and a heterogeneous set of robotic systems which served as the core platforms for the research and development phase of the KI.FABRIK initiative. The work cells were both physical and digital, with their interconnection across different locations supported by the 5G Campus Network.
euROBIN – European Network of Excellence in Robotics
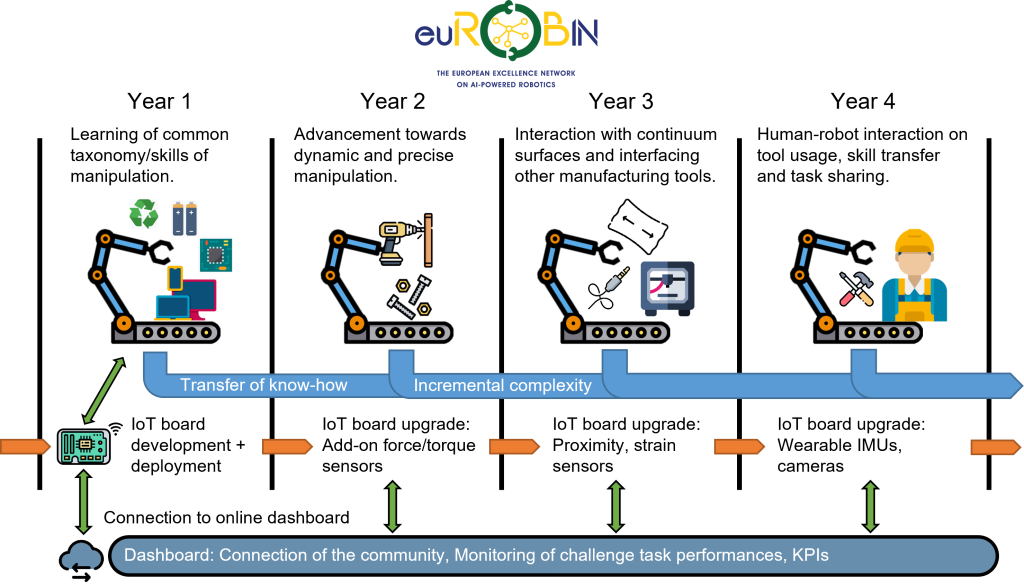
euROBIN is a large scale project that involves 24 academic and 7 industrial partners accross Europe to push robotic technologies and digitalization further into industrial services. This project aims manufacturing, personal, and outdoor robots to rapidly acquire new skills via physical interaction, machine learning, abstract knowledge handling, and human-centric design in industrial settings. euROBIN establishes a sustainable network of excellence, utilizing the EuroCore repository to facilitate the exchange of software, data, and knowledge, thereby fostering a European robotics ecosystem where robots collectively learn and adapt to a wide range of tasks.
The project started in 2022 and was supported by the European Union’s Horizon Europe Framework Programme under grant agreement No 101070596.
As the Chief of Science at MIRMI/TUM, I contributed to the development of this project proposal and acted as project manager of TUM from 2021 to 2024. Our goal in this project was to work with our industrial partners to pick essential challenges in the sustainable manufacturing processes, such as recycling, cable binding, and connect the efforts of all associated partners over a single system. We followed the ingenious idea of Mr. Peter So, and developed an IoT board that collects all interaction data during the manipulation tasks of a robot and its target object. This data is then sent to the euROBIN’s EuroCore to serve as a skill, method, and result repository for all partners to use and share to address common manufacturing challenges. The video shows another inspiration for euROBIN, the Robothon Challenge, which brings competitors together using the IoT boards to address common tasks. In euROBIN, we converted these competitions into “coopetitions”.
Agricultural Robotics – Harvesting with Hybrid Grippers
Manipulation of soft produce using robotic grippers always represented a significant advancement in agricultural and food processing technology. The main goal is of course automating the complete process without damaging the delicate plants and the produce, ensuring sustainability and economic benefit. That’s why such grippers often feature soft, flexible materials and suction mechanisms that mimic human dexterity, ensuring a gentle yet firm hold on the objects. Furthermore, robotic grippers must offer the advantage of operating in diverse and challenging conditions, such as varying plant densities and heights. They should also benefit from advanced sensors and machine learning algorithms to navigate complex environments and adapt to different types of varieties.
I had this clear application in my mind when I started my research on soft robotic grippers at the University of Cambridge. Combining the soft and rigid components in the robotic gripper design allowed us to handle the soft produce with care and complete a harvesting task successfully. The first video shows our “harvesting simulation” of lettuce for the Sainsbury’s in UK, who wanted to automate their lettuce harvesting process. The group that I worked together on this project later on proceeded with a different design and brought the robot on to the field. The second video shows the common effort of our project to translate the robotics technology to agriculture automation.
This application field has great potential for soft grippers, that is why I’m coordinating another project at TUM for the same goal.
6G-life – Remote Robotic Surgery
6G-life is a project that TU Dresden and the Technical University of Munich have partnered to establish, aiming to advance pioneering research in future 6G communication networks, with an emphasis on human-machine collaboration. By merging their expertise, these two leading universities bring together their globally recognized work in areas such as Tactile Internet within the Cluster of Excellence CeTI, 5G communication networks, quantum communication, Post-Shannon theory, artificial intelligence techniques, and adaptable hardware and software platforms. With nearly €70 million budget, 6G-life is set to greatly boost Germany’s industry and startup ecosystem through impactful showcase projects, thereby strengthening the country’s digital sovereignty in the long term. Research and economic growth will be driven by test fields for two specific use cases. The initiative aims to launch at least 10 new startups within its first four years and engage with at least 30 existing ones. It is also committed to guiding the public through the digital transformation, thereby contributing positively to society.
As the Chief of Science at MIRMI/TUM, I worked as a principal investigator and the project manager in this project, leading a team to develop a surgical robotics system setup that will use the 6G communication technology to advance remote and tactile surgical operations. Thanks to its high bandwidth and extremely low-latency, 6G communication will enable (mobile) robots to be much lighter and long-lasting as much of the computation could be off-loaded to the cloud. In the same direction, our goal was to significantly increase the visuo-tactile feedback from the robot system to create an immersive surgery setup for a remote operator. The video shows a remotely controlled robot performing minimal invasive operation on a “ghost” patient.
